Subscribe#
ここでは、カメの現在位置をSubscribeします。
先に述べたようにカメからは自己位置とカラーセンサのトピックが出力されており、ここでは自己位置を取得することを目標にします。
新しく sub_node を作成します。
cd ~/ros2_ws
touch ~/ros2_ws/src/my_package/src/sub_node.cpp
# code ~/ros2_ws/src/my_package/src/sub_node.cpp
以下のプログラムを追記します。
#include <rclcpp/rclcpp.hpp>
#include <turtlesim/msg/pose.hpp>
class SubClass : public rclcpp::Node
{
public:
SubClass() : Node("sub_node")
{
using namespace std::placeholders;
subscription_ = this->create_subscription<turtlesim::msg::Pose>("pose", 10, std::bind(&SubClass::topic_callback, this, _1));
}
private:
void topic_callback(const turtlesim::msg::Pose::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: x: '%f', y: '%f'. r: '%f'", msg->x, msg->y, msg->theta);
}
rclcpp::Subscription<turtlesim::msg::Pose>::SharedPtr subscription_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SubClass>());
rclcpp::shutdown();
return 0;
}
次はCMakeListsにコンパイル対象を追加していきます。
ただし、今回追記する部分は被っている部分が多いので、set()で変数を指定します。
14行目付近にset(TARGET my_node)を追加します。27行目のinstallの部分以外のmy_nodeを${TARGET}に変更します。
以下のCMakeLists.txtに置き換えます。
cmake_minimum_required(VERSION 3.8)
project(my_package)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)
set(TARGET my_node)
add_executable(${TARGET} src/${TARGET}.cpp)
target_include_directories(${TARGET} PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
target_compile_features(${TARGET} PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
ament_target_dependencies(
${TARGET}
"rclcpp"
"geometry_msgs"
"turtlesim"
)
install(TARGETS my_node
DESTINATION lib/${PROJECT_NAME})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
以下の画像はTARGET変数を設定した後です。

sub_nodeをコンパイル対象に追加します。上の水色枠を下にコピペしてTARGETの変数を変更します。
また、installのターゲットにsub_nodeを追記します。
以下の画像はその作業を行った後です。

コピペではなく、自分で修正を行ってみましょう。
ビルド・実行#
cd ~/ros2_ws
colcon build
実行してみます
turtlesim側
ros2 run turtlesim turtlesim_node
sub_node側
ros2 run my_package sub_node --ros-args -r pose:=/turtle1/pose
2つ目のウィンドウで(sub_node側)は、次のようなログコマンドが流れてきます。
pi:~/ros2_ws$ ros2 run my_package sub_node --ros-args -r pose:=/turtle1/pose
[INFO] [1669130545.834893426] [sub_node]: I heard: x: '5.544445', y: '5.544445'. r: '0.000000'
[INFO] [1669130545.851114887] [sub_node]: I heard: x: '5.544445', y: '5.544445'. r: '0.000000'
...
これはturltesimが出力した自己位置ですが、変化していません。(動いていないので当然ですね)
プログラムの同時起動#
カメを動かすために、前章のプログラムも同時に起動させてみましょう。
同時に複数のプログラムを起動する時は、launchファイルを作成・利用します。 ここでは、
- turtlesim_node
- my_node
- sub_node
を同時起動するように作成していきます。
launchディレクトリの作成#
まずは、launchディレクトリ・ファイルを作成して編集します。
mkdir ~/ros2_ws/src/my_package/launch
touch ~/ros2_ws/src/my_package/launch/turtlesim.launch.py
# code ~/ros2_ws/src/my_package/launch/turtlesim.launch.py
以下は、launchファイルの中身です。
ROS2ではPythonのAPIを直接使用するのがメジャーですが、他にもxmlやyamlでも記述できます。
#!/bin/env python3
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
nodes = [
Node(
package='turtlesim',
executable='turtlesim_node',
name='turtlesim_node'
),
Node(
package='my_package',
executable='my_node',
name='pub_node',
remappings=[
('/cmd_vel', '/turtle1/cmd_vel'),
]
),
Node(
package='my_package',
executable='sub_node',
name='sub_node',
remappings=[
('/pose', '/turtle1/pose'),
]
)
]
return LaunchDescription(nodes)
インストールのためにCMakeLists.txtにlaunchディレクトリを追記します。
install(DIRECTORY launch
DESTINATION share/${PROJECT_NAME})

再びビルドします。
cd ~/ros2_ws
colcon build
実行#
実行します。
source ~/ros2_ws/install/setup.bash
ros2 launch my_package turtlesim.launch.py
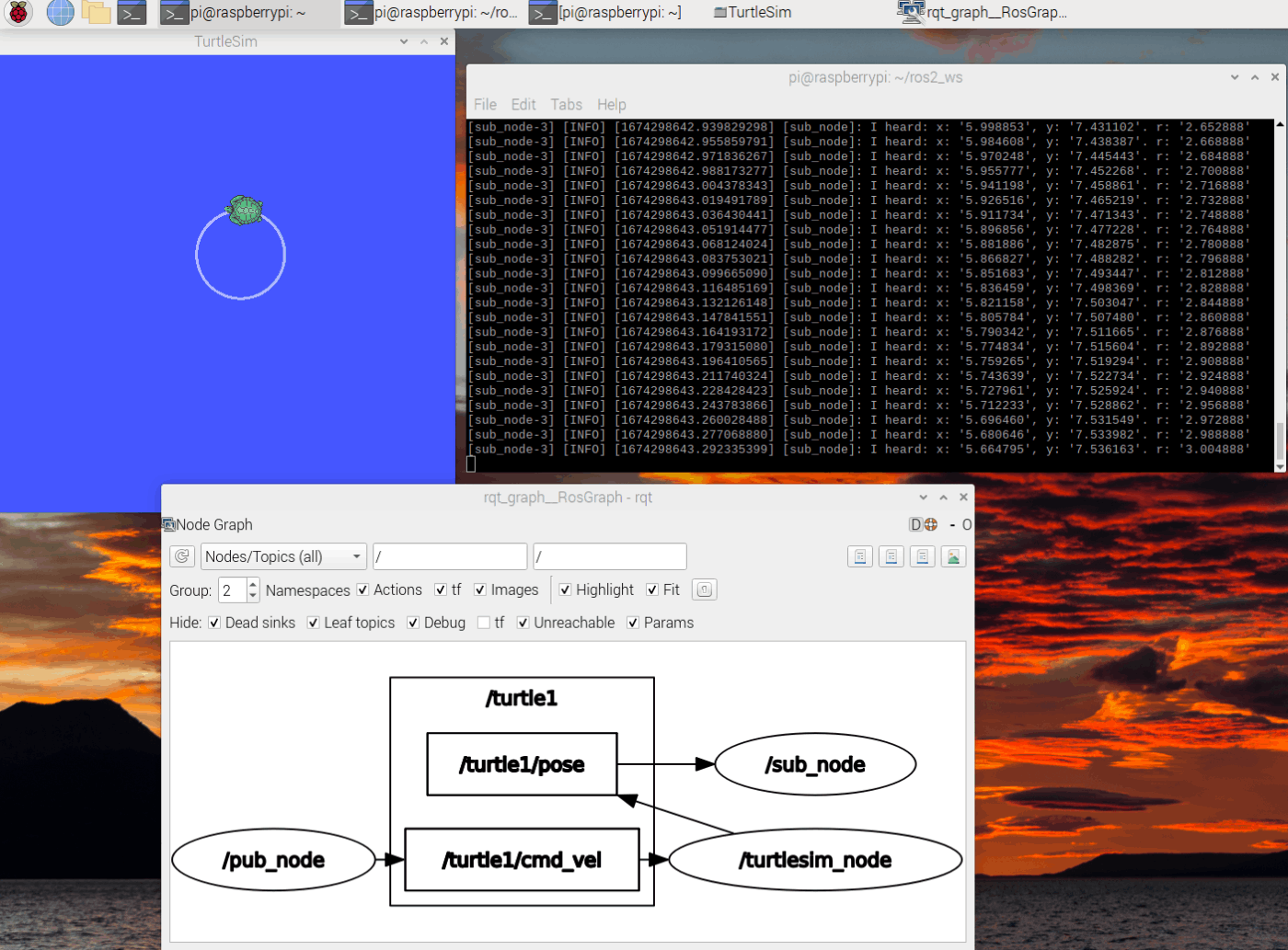
移動しながら位置を出力しています。