Publish#
次は、カメを動かす簡単なプログラムを作成してみましょう。
パッケージの作成#
C++を使用して直進を行うプログラムを作成してみましょう。
ROS2は1つのパッケージの作成に必要なファイルがいくつかあります。
最初はかなり面倒だとは思いますが、頑張って慣れていきましょう!
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
source /opt/ros/humble/setup.bash
ros2 pkg create --build-type ament_cmake --depend rclcpp geometry_msgs turtlesim --node-name my_node my_package
パッケージ作成を行ったので、ひとまずビルドしましょう。
cd ~/ros2_ws/
colcon build
launchファイルを毎回書き換えるたびにビルドが必要です。
--symlink-installオプションを使用するとその手間が省けます。
プログラムの作成#
code ~/ros2_ws/src/my_package/src/my_node.cpp コマンドでVSCodeを開いて以下のコードに置き換えます。
#include <rclcpp/rclcpp.hpp>
#include <geometry_msgs/msg/twist.hpp>
class MyClass : public rclcpp::Node
{
public:
MyClass() : Node("my_node")
{
publisher_ = this->create_publisher<geometry_msgs::msg::Twist>("cmd_vel", 10);
timer_ = this->create_wall_timer(std::chrono::milliseconds(100), std::bind(&MyClass::timer_callback, this));
}
private:
void timer_callback()
{
auto message = geometry_msgs::msg::Twist();
message.linear.x = 1.0;
message.angular.z = 1.0;
publisher_->publish(message);
}
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MyClass>());
rclcpp::shutdown();
return 0;
}
ビルドにはcolcon buildを使用します。
実行#
turtlesimを起動します(既に起動しているなら不要です)
source ~/ros2_ws/install/setup.bash
ros2 run turtlesim turtlesim_node
次に、作成したプログラムを実行します。
source ~/ros2_ws/install/setup.bash
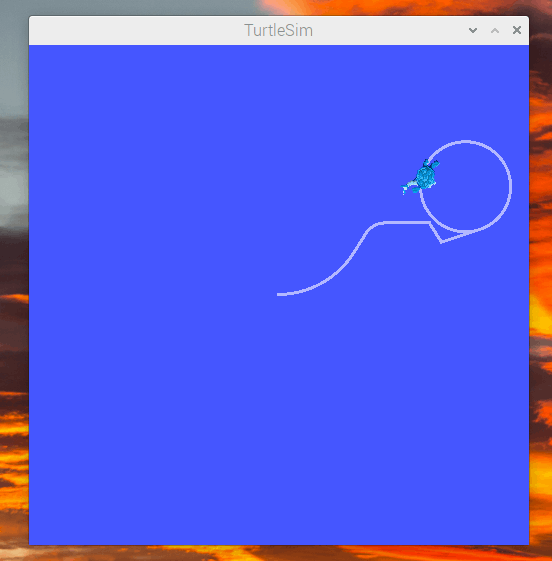
ros2 run my_package my_node --ros-args -r /cmd_vel:=/turtle1/cmd_vel
半時計回りにカメが回転します。